
1. Intro
Ini adalah artikel tentang operasi dasar pada Python
2. Persiapan
Bahan :
- Arduino Uno
- LCD 16x2
- Stepper motor NB6600
- Keypad 4x4
- Relay
- PWM Pulse Generator
- Usongshine Nema 17 17HS4401 Motor Stepper 42-40MM 12V 1.5A plus Kabel (Motor)
- Infrared Obstacle Avoidance Sensor IR Proximity
Fitur :
- Putaran berdasarkan input keypad, jika mencapai target keypad relay akan berhenti
- Live Count putaran muncul pada LCD menggunakan sensor
- Press # to reset counting
Gambaran :
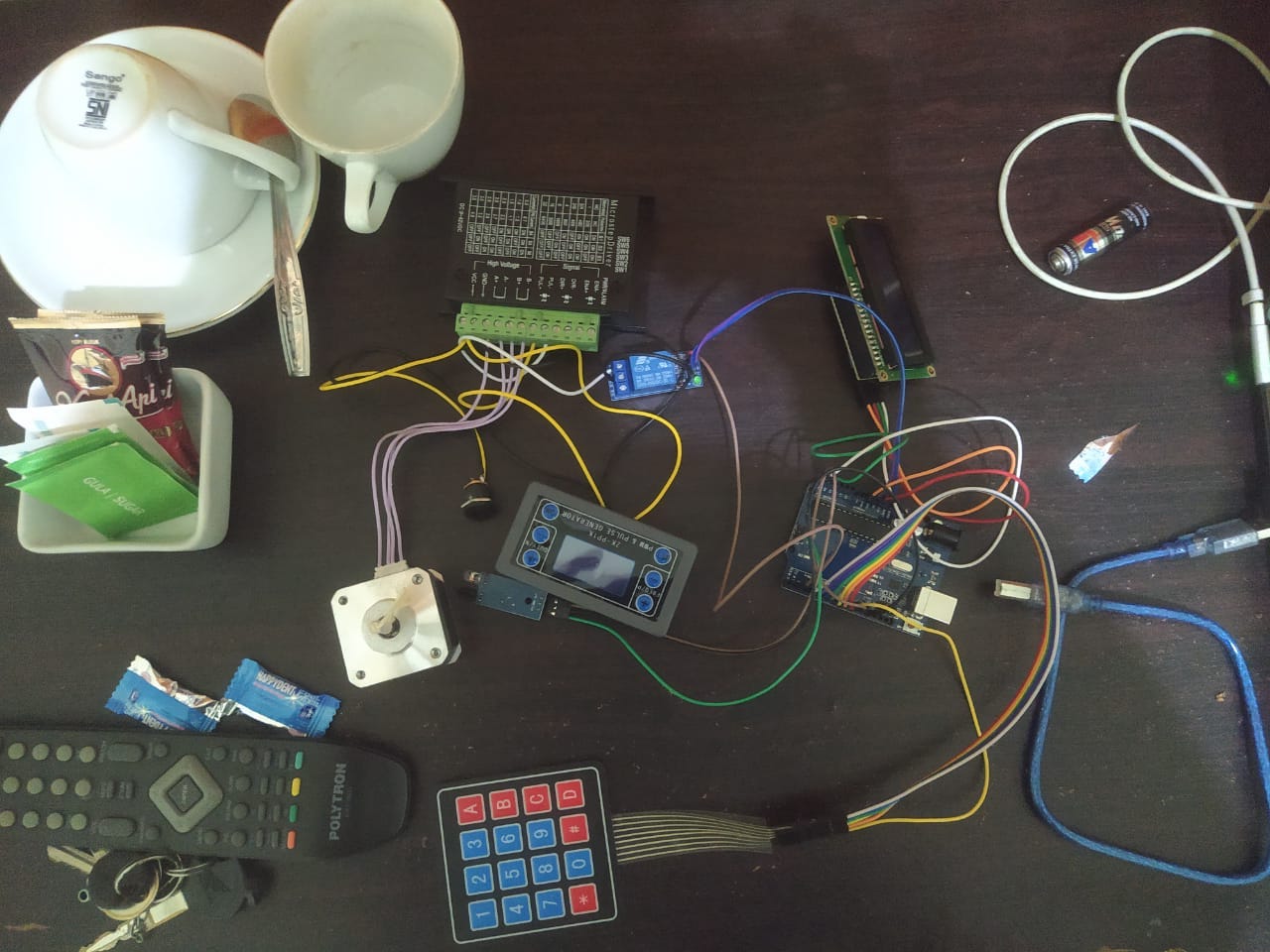 </img>
</img>
3. Code Program
#include <Keypad.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
// Pin Relay
const int relay = 2;
const int Aktif = LOW;
const int TidakAktif = HIGH;
// Keypad Setting 4x4
const byte ROWS = 4;
const byte COLS = 4;
char hexaKeys[ROWS][COLS] = {
{'1', '2', '3', 'A'},
{'4', '5', '6', 'B'},
{'7', '8', '9', 'C'},
{'*', '0', '#', 'D'}
};
byte rowPins[ROWS] = {11, 10, 9, 8};
byte colPins[COLS] = {7, 6, 5, 4};
Keypad customKeypad = Keypad(makeKeymap(hexaKeys), rowPins, colPins, ROWS, COLS);
// Setting LCD
LiquidCrystal_I2C lcd(0x3F, 16, 2);
String speedInput = "";
int motorSpeed = 0;
volatile int rotationCount = 0;
volatile bool updateLCD = false;
void setup() {
Serial.begin(9600);
pinMode(relay, OUTPUT);
digitalWrite(relay, TidakAktif);
lcd.begin();
lcd.backlight();
lcd.setCursor(0, 0);
lcd.print("S.PUTARAN: ");
lcd.setCursor(0, 1);
lcd.print("P.TERBACA: ");
// Fungsi Count
attachInterrupt(digitalPinToInterrupt(12), countRotation, RISING);
}
void loop() {
char customKey = customKeypad.getKey();
if (customKey) {
Serial.println(customKey);
if (customKey >= '0' && customKey <= '9') {
speedInput += customKey;
lcd.setCursor(12, 0);
lcd.print(speedInput);
} else if (customKey == '*') {
if (speedInput.length() > 0) {
motorSpeed = speedInput.toInt();
if (motorSpeed > 0) {
lcd.setCursor(12, 0);
lcd.print(" ");
lcd.setCursor(12, 0);
lcd.print(motorSpeed);
digitalWrite(relay, Aktif);
Serial.println("Relay is ON");
simulateMotorRotations();
} else {
lcd.setCursor(12, 0);
lcd.print("Err");
}
}
} else if (customKey == '#') {
speedInput = "";
lcd.setCursor(12, 0);
lcd.print(" ");
lcd.setCursor(12, 1);
lcd.print(" ");
digitalWrite(relay, TidakAktif);
Serial.println("Relay is OFF");
rotationCount = 0;
lcd.setCursor(12, 1);
lcd.print("0 ");
}
}
// Update Live Count
if (updateLCD) {
lcd.setCursor(12, 1);
lcd.print(rotationCount);
updateLCD = false;
}
}
// Fungsi Stop
void countRotation() {
rotationCount++;
updateLCD = true; // Set flag to update the LCD in the main loop
}
// Proses Putaran Motor
void simulateMotorRotations() {
for (int i = 0; i < motorSpeed; i++) {
delay(500); // Simulate time for one rotation
countRotation(); // Increment the rotation count
lcd.setCursor(12, 1); // Update the LCD
lcd.print(rotationCount);
}
digitalWrite(relay, TidakAktif); // Turn relay OFF after simulation
Serial.println("Relay is OFF after simulation");
}
Hasil
Silahkan Lihat Pada Video Demo Dibawah :